Eurobot 2006 - Internationaler Roboterwettbewerb
Technische Universität Chemnitz
Projektteam:
Thomas Krause, Herr Niko Sünderhauf, Marcel Wagner,Anja Buschmann (Public Relations)
Aufgabenstellung:
Konstruktion eines mobilen, autonomen Roboters für einen Golfwettbewerb.TU Chemnitz sucht den Vergleich mit internationaler Konkurrenz - igus® sponsert Bauteile
Beim Eurobot 2006, einem internationalen Roboterwettbewerb, steht in diesem Jahr alles im Zeichen des Golfspielens. Bereits zum dritten Mal stellen sich die Studenten der TU Chemnitz den jährlich wechselnden Spielregeln und gehen hochmotiviert ans Werk.
Die Spielregeln
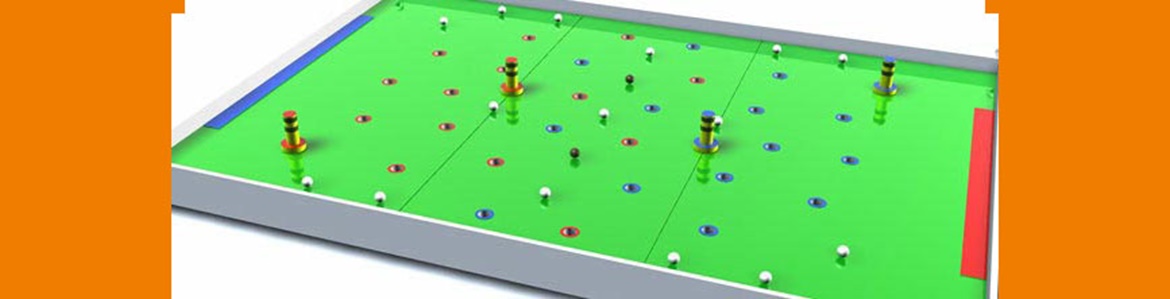
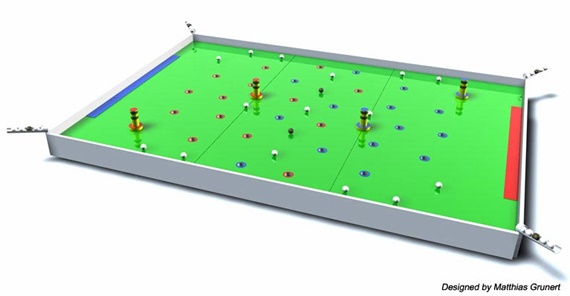
14 rote und 14 blaue Löcher sind über eine Fläche von 2x3 Metern verteilt. Zu Spielbeginn sind 15 weiße und zwei schwarze Bälle auf dem Spielfeld verteilt. Für Ballnachschub sorgen vier aufgestellte Totems, die je vier weiße und einen schwarzen Ball ins Spiel befördern.
Aufgabe der autonomen Roboter ist es nun, innerhalb von 90 Sekunden Spielzeit möglichst viele der eigenen Löcher in der gegnerischen Spielfeldhälfte mit weißen Bällen zu füllen und schwarze in die Löcher des Gegners zu befördern, damit dieser keine Punkte erlangen kann. Es steht jedem Team frei, die vom Gegner mit schwarzen Bällen gefüllte Löcher zu leeren und mit den punkteträchtigen Weißen zu füllen. Jedes Team darf genau einen Roboter auf dem Feld platzieren - selbstverständlich unter Berücksichtigung der Einhaltung gewisser Maße und Regeln.
Die Anforderungen
Schnelligkeit, Präzision und eine clevere Taktik stehen neben der stabilen Stromversorgung auf dem Programm. Um die Gewinnchancen zu steigern, hat das 17-köpfige Projektteam – vorrangig Studenten aus den Fachbereichen Elektrotechnik und Informatik – einen Roboter mit „Bürstensystem“ entwickelt.
Der kettenbetriebene Roboter sammelt beim Überqueren des Spielfeldes durch rotierende Bürsten die herumliegenden Bälle auf. Im Inneren des Roboters befindet sich ein sorgfältig programmiertes System, dass den Roboter befähigt, die Bälle auf dem Spielfeld zu lokalisieren, aufzunehmen und nach ihren Farben zu sortieren. Außerdem muss der Roboter die Löcher auf dem Spielfeld farblich und nach deren Verfügbarkeit - frei oder besetzt - unterscheiden.
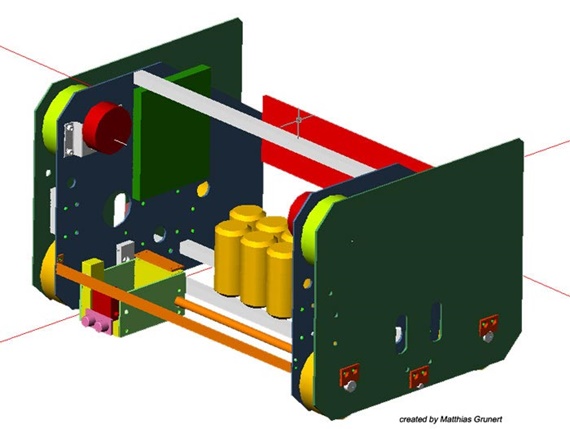
Ist das erfolgt, werden die Bälle durch eine Schlittenkonstruktion (vergleichbar mit dem Transport einer Druckerpatrone bei einem Tintenstrahldrucker) in die Löcher befördert.
Der Schlitten, den das Chemnitzer Team ins Rennen schickt, wird mithilfe von iglidur G® -Gleitlagern von igus® gelagert. Das Lager eignet sich besonders für extrem hohe Belastungen bei niedriger bis mittlerer Geschwindigkeit. Zahlreiche Schwenk- und Drehbewegungen gehören zu den Grundanforderungen des Roboters. Diese können mit dem hochleistungsfähigen Gleitlager durchgeführt werden.
Nach nationaler Qualifikationsrunde, treten maximal drei Teams zum internationalen Wettbewerb, den Eurobotopen 2006 in Catania (Sizilien) an.
igus® fiebert mit und drückt fest die Daumen!
