
Leo 09
Leistungs- und Funktionsbeschreibung Leo 09
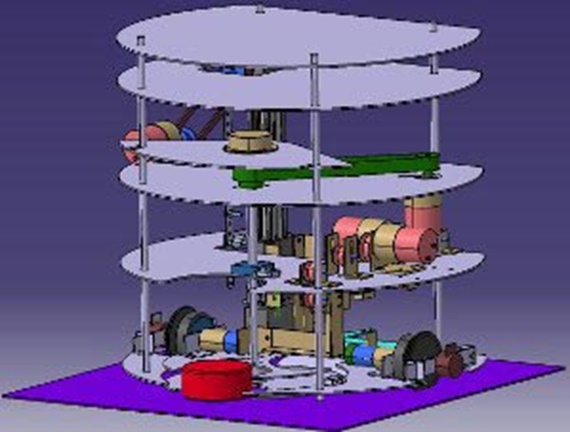
Das erste Bild zeigt den Leo 09 in der Gesamtansicht als 3D Darstellung. Um eine einheitliche Benennung der Fahrtrichtungen zu gewährleisten, wurden in das Bild Richtungsbezeichnungen eingefügt.Der Roboter besteht aus 5 wesentlichen Komponenten, die für die Aufgabenbewältigung benötigt werden
1. Antrieb
2. Rotationsspeicher zur Aufnahme und Speicherung der Pucks
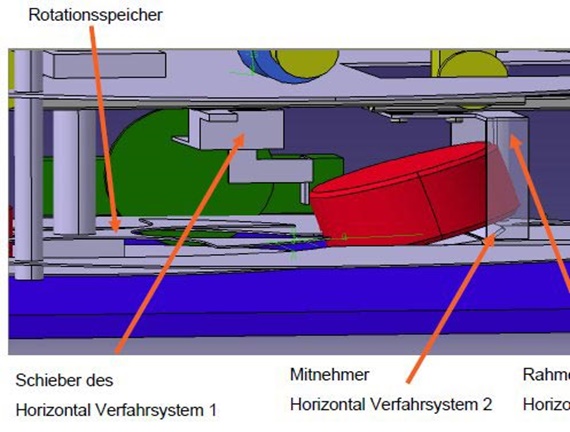
3. Horizontal Verfahrsystem 1 zum Entfernen der Pucks aus dem Rotationsspeicher
4. Horizontal Verfahrsystem 2 zum Ausschieben der Pucks aus dem Roboter
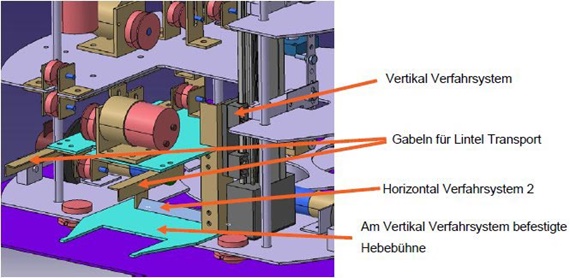
5. Vertikal Verfahrsystem zum Heben der Pucks für den Bau der Türme
Ein vom Rotationsspeicher aufgenommener Puck durchläuft bis zur Abgabe nacheinander die Komponenten 3 und 4 und wird ggf. mit Komponente 5 auf ein gewünschtes Niveau gehoben. Es folgt eine detailliertere Beschreibung der einzelnen Komponenten.
Antrieb
Der Antrieb dient dazu den Roboter zu jedem beliebigen Ort auf dem Spielfeld zu bewegen. Darin inbegriffen sind die Einrichtungen zur Positionsbestimmung und Regelung in Form des Odometriesystems.Rotationsspeicher
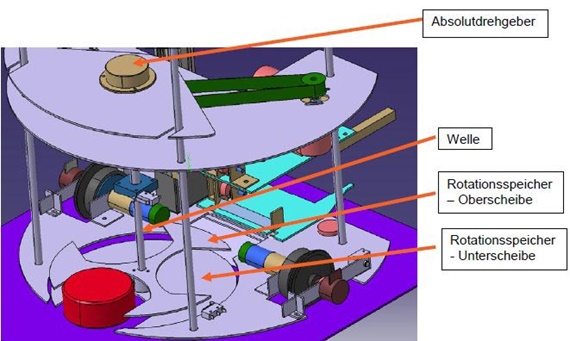
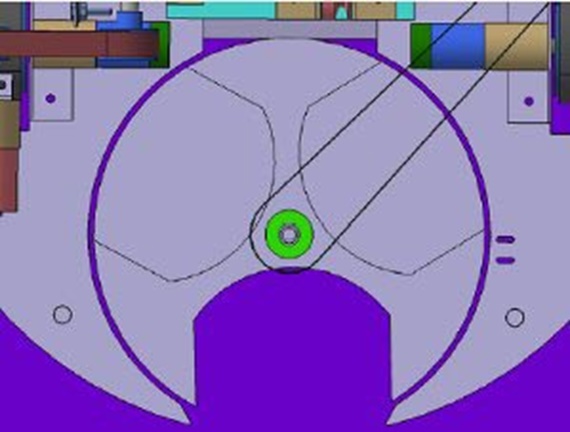
Der Rotationsspeicher dient dazu die Pucks aus dem Spender zu entfernen, sie zu speichern und sie an entsprechender Stelle für den Weitertransport im Roboter bereit zu stellen. Der Rotationsspeicher wird über eine Welle und einen Zahnriemen durch einen Gleichstrommotor angetrieben. Um jede beliebige Winkelposition einstellen zu können ist ein Absolutdrehgeber mit der Welle des Rotationsspeichers verbunden.Der Rotationsspeicher besteht aus zwei Scheiben. Einer Unterscheibe und einer Oberscheibe. Beide Scheiben können sich gegeneinander nicht verdrehen. In die Oberscheibe sind drei Taschen eingearbeitet. In diese Taschen können die Pucks aufgenommen werden. In der Unterscheibe befindet sich nur eine Tasche, die mit einer der Taschen in der Oberscheibe deckungsgleich montiert ist. Damit ergibt sich ein Speicherplatz, der keinen Boden hat. Dieser Platz wird benötigt um den mit Pucks gefüllten Spender anfahren zu können. Im Bild 1-3 ist der Rotationsspeicher in der Puckaufnahmeposition zu sehen.
Wenn der Leo 09 an den Spender gefahren ist können die Pucks durch Rotation des Speichers einer nach dem anderen in den zwei übrigen Taschen aufgenommen werden. Neben der Puck Aufnahmeposition gibt es zwei weitere markante Positionen des Rotationsspeichers, die Puck Ausgabepositionen. Diese sind im Bild 1-4 dargestellt. Sie werden erreicht in dem der Rotationsspeicher entgegen des Uhrzeigersinns gedreht wird. Es können nur diejenigen Pucks wieder aus dem Rotationsspeicher herausbefördert werden, die sich in den Taschen, die einen Boden besitzen befinden.
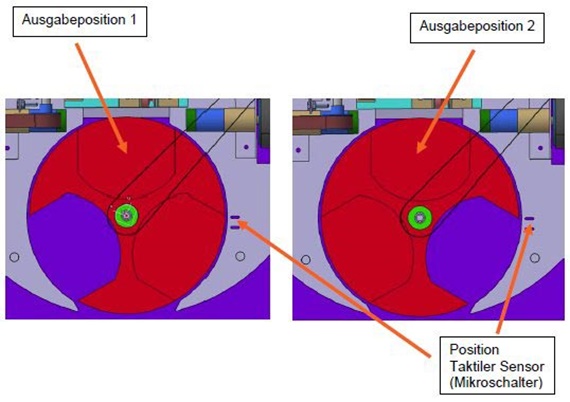
Der Puck, der in der Tasche ohne Boden aufgenommen wurde kann nicht über das Horizontal und Vertikal Verfahrsystem nach draußen befördert werden. Er bleibt im Rotationsspeicher und muss entweder am Spender zurückgelassen werden, oder kann mitgenommen und dann ausschließlich in Bauzone 1 verbaut werden. Zum Transport des Pucks muss der Rotationsspeicher während der Fahrt eine der beiden in Bild 1-4 dargestellten Positionen einnehmen.
Horizontal Verfahrsystem 1 und 2
Das Horizontal Verfahrsystem 1 hat die Aufgabe die Pucks, die sich in einer Ausgabeposition im Rotationsspeicher befinden (siehe Bild 1-4) aus dem Rotationsspeicher herauszuschieben und an die Übergabeposition zu fördern, von wo aus das Horizontal Verfahrsystem 2 bzw. das Vertikal Verfahrsystem die Weiterbeförderung des Pucks übernimmt.Das Horizontal Verfahrsystem 1 schiebt mit einem an einem Schlitten befestigten Schieber den Puck über eine Rampe aus dem Rotationsspeicher. Der Schieber schiebt den Puck solange, bis ein Endlagenschalter (Mikroschalter) betätigt wird und das Horizontal Verfahrsystem 1 stoppt. Der Puck liegt nun bereits auf der Hebebühne, die am Vertikal Verfahrsystem befestigt ist.
Das Horizontal Verfahrsystem 1 kann wieder in seine Ausgangsposition zurückgefahren werden. Dabei wird der Schieber solange bewegt bis wieder ein Endlagenschalter betätigt wird.
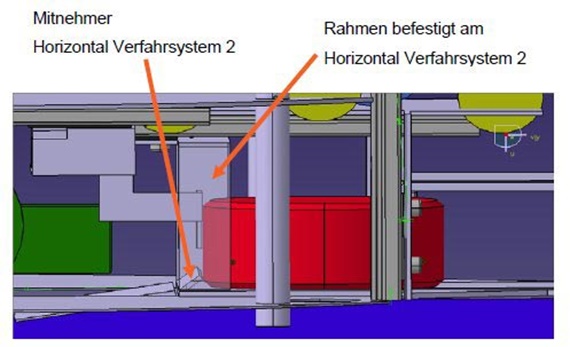
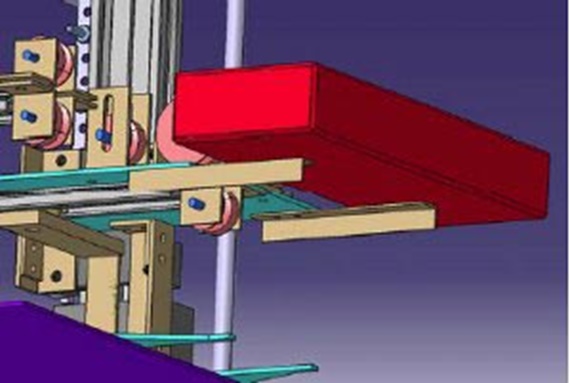
Das Horizontal Verfahrsystem 2 hat nun die Aufgabe den Puck mit Hilfe des Mitnehmers (vgl. Bild 1-5 und Bild 1-6) auf der Hebebühne nach hinten zu befördern. Es gibt 3 verschiedene Positionen die vom Horizontal Verfahrsystem 2 angefahren werden können
1. Position, an der Übergabe des Pucks vom H. Verfahrsystem 1 erfolgt
2. Zwischenposition, um den Puck ein Stück weiter nach hinten zu schieben, um Platz zu schaffen für den nächsten Puck aus dem Rotationsspeicher
3. Endposition, wird angefahren um den Puck aus dem Roboter zu schubsen
Das erreichen der Positionen wird jeweils durch das Betätigen eines Mikroschalters signalisiert.
Vertikal Verfahrsystem
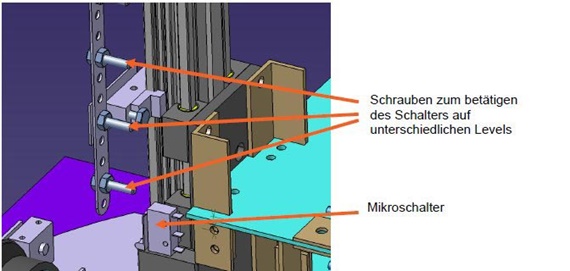
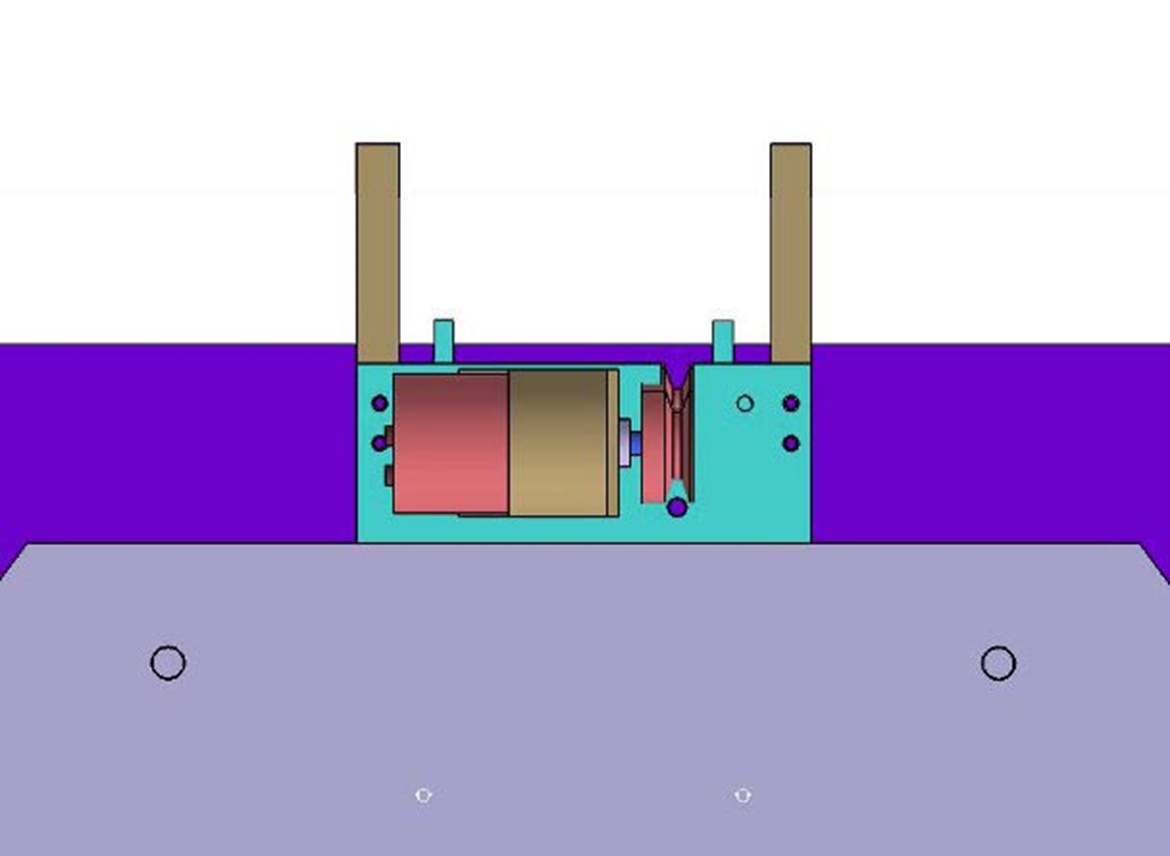
Mit Hilfe des Vertikal Verfahrsystems können die vom Horizontal Verfahrsystem 1 auf die Hebebühne geschobenen Pucks nach oben gefahren werden, um Pucks übereinander zu stapeln bzw. um höher gelegene Bauzonen zu erreichen.Ob das Vertikal Verfahrsystem die gewünschte Höhe erreicht hat wird mit Hilfe eines Mikroschalters kontrolliert. Der Schalter ist wie im Bild 1-8 zu sehen direkt an der Hebebühne befestigt und fährt mit ihr hoch und runter. An einer Schiene befestigte Schrauben können auf den gewünschten Levels platziert werden und betätigen dort den Mikroschalter.
Um zu erkennen, ob an einer Stelle an der ein Turm gebaut werden soll bereits ein Puck liegt kann mit Hilfe von zwei Dinstanzsensoren der Ausschiebebereich geprüft werden. Strahlwinkel und – richtung der Dinstanzsensoren sind im Bild 1-10 dargestellt. Da die Sensoren mit der Hebebühne hoch und runter fahren können ermöglicht es dieses System auch die Oberkante eines Turms auszumachen, um darauf noch einen Puck stapeln zu können.
Überlegungen zur Puck Speicherstrategie
Um die maximale Anzahl von 4 Pucks aufnehmen zu können müsste die Aufnahme in zwei Phasen erfolgen.In der ersten Phase werden die zwei Speicherplätze mit Boden mit jeweils einem Puck gefüllt. Der Rotationsspeicher wird bis zur Ausgabeposition 1 gedreht und gestoppt. Der Puck wird mit dem Horizontal Verfahrsystem aus dem Rotationsspeicher herausgeholt. Wenn die Tasche leer ist, wird der Spender in der zweiten Phase wieder weiter gedreht und der nächste Puck im Spender fällt in die frei gewordene Tasche.
Der Leo hat dann damit einen Puck auf der Hebbühne, zwei im Speicher, die er nach hinten raus schieben kann und einen, der in der Tasche ohne Boden liegt.
Beschreibung des Anfahrens eines Spenders
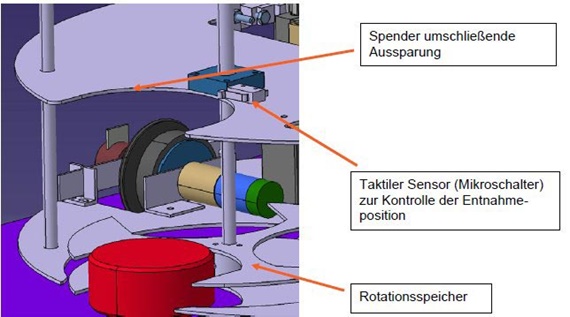
Für das Anfahren des Spenders muss sich der Leo so ausrichten, dass er vorwärts im 90° Winkel zur Bande auf den Spender zu fahren kann. Der Rotationsspeichers hat die Puckaufnahmeposition (vgl. Bild 1-3) eingenommen.Der Leo fährt so lange bis der Spender von der dafür vorgesehenen Aussparung umschlossen ist (vgl. Bild 3-1). Damit der Leo erkennt, ob er dicht genug an den Spender gefahren ist befindet sich in der Aussparung ein Mikroschalter, der von der Außenhülle des Spenders betätigt wird.
Fähigkeiten und Funktionen des Leo 09 im Spiel
Folgende Fähigkeiten soll der Leo 09 im Spiel aufweisen können. Die fettgedruckten Punkte haben höhere Priorität. Er kann
1. mit einem mal 4 Pucks aus einem mit 5 Pucks gefüllten Spender entnehmen (einer der 4 Pucks kann dabei nur so aufgenommen werden, dass er nicht über die Horizontal und Vertikal Verfahrsysteme ausgegeben werden kann)
2. auf jeder der drei Bauzonen Türme bauen
3. mit den 4 Pucks einer Spenderleerung einen Tempel Bauen
4. wenn die Tasche ohne Boden im Rotationsspeicher leer ist einen Puck vom Spielfeld aufnehmen und in Bauzone 1 verbauen
